<2026> Technology Development Status and Market Outlook for Humanoid Robots and Robot Batteries (~2040)
상품코드:1969490
리서치사:SNE Research
발행일:2026년 02월
페이지 정보:영문 또는 국문 - 471 Pages
라이선스 & 가격 (부가세 별도)
한글목차
CES 2026에서는 ‘휴머노이드 로봇’이 기술 전시의 중심 축으로 자리 잡았으며, AI와 Physical AI가 결합된 여러 신제품이 공개되며 산업·서비스·가정용 로봇의 현주소를 보여주었습니다. 특히 Nvidia, LG, Boston Dynamics를 비롯한 글로벌 기업들이 실제 작업 능력과 상호작용 가능성을 시연하는 로봇을 전시, AI 기반 제어·인지 기능이 로봇 상용화를 가속화하는 모습이 부각됐습니다.
Boston Dynamics는 CES 2026에서 실전급 제조 현장 적용을 겨냥한 전동식 차세대 Atlas 로봇을 선보였고, 한국·중국·미국 등 다양한 국가 출품사들이 경쟁적으로 산업·서비스·엔터테인먼트 영역에 활용 가능한 모델을 전시했으며, 이는 전통적인 시연 중심 전시에서 벗어나 실제환경 적용 테스트 중심으로 전환되고 있음을 시사합니다.
중국에서는 UBTECH, Unitree와 스타트업들도 전시장 곳곳에서 진보된 휴머노이드들을 선보였는데 일부는 산업현장 부품 분류/정리 작업을 완전 자율로 시연하거나 상호작용 데모를 통해 공장·물류·서비스 적용 가능성을 강조하였으며, 한국·일본도 로봇 본체뿐 아니라 액추에이터·감속기·센서·배터리 등 핵심 부품을 선보이며 경쟁력을 확보하여 생태계를 넓히는 전략을 선보였습니다.
한편, 일론 머스크는 휴머노이드 로봇(Optimus)이 장기적으로 테슬라의 가장 큰 사업이 될 수 있다고 언급하며, 차량보다 훨씬 큰 경제적 가치를 창출할 수 있다고 강조하면서 Model S/X EV 생산라인 일부를 휴머노이드 로봇 생산라인으로 전환해 연간 100만대를 생산하겠다고 선언했습니다. 더 나아가 그는 Optimus가 공장 노동부터 시작해 점차 일상적인 인간 노동을 대체하게 될 것이며, 대량 생산을 통해 가격을 $2만 이하로 낮추는 것이 목표라고 밝혔습니다.
최근 휴머노이드 로봇 개발은 (1)하드웨어의 양산형 전환, (2)지능(Embodied AI)의 급격한 고도화, (3)실제 현장 투입을 위한 안전·신뢰성·운영(SoS)체계 구축으로 요약됩니다. 과거에는 보행이 되느냐/안 되느냐가 핵심이었다면, 지금은 얼마나 오래, 얼마나 싸게, 얼마나 안전하게, 그리고 얼마나 많은 대수로 운영할 수 있느냐가 승부처가 됐습니다. 특히 제조·물류 중심의 반복 작업은 ROI 계산이 명확해 초기 상용화의 최유력 시장으로 자리 잡고 있습니다.
글로벌 리서치사들의 휴머노이드 로봇 시장전망은 무엇을 시장으로 보느냐에 따라 전망치 차이가 크게 나고 있는데, ①시장 규모(매출) 전망과 ②출하/보급(대수) 전망으로 나눠서 보는 것이 타당합니다.
Goldman Sachs는 휴머노이드 로봇의 TAM(총주소가능시장) 을 2035년 380억 달러로 제시했고, MarketsandMarkets은 “Humanoid Robot Market”을 2025년 29.2억 달러에서 2030년 152.6억 달러의 고성장을, IDTechEx도 2035년 약 300억 달러 수준으로 성장 가능하다는 관점을 제시하고 있는 반면 스위스 투자은행인 UBS는 2035년 300-500억 달러를 제시하면서도, 2050년 1.4-1.7조 달러까지 확장되는 생태계/부품/데이터/서비스 포함 대형 그림을 함께 제시하고 있습니다.
SNE Research의 전망에 따르면, 배터리 화학계(LFP, NCM, 반고체, 전고체)별 셀 가격 하락과 더불어 셀 평균 단가(ASP)도 35년엔 $94/kWh, 40년엔 -$70/kWh까지 하락할 것으로 보이며 이에 따른 휴머노이드 로봇 배터리 셀 시장은 40년엔 105억 달러가 넘을 것으로 전망됩니다.
출하/보급(대수) 관점 전망에서는 Omdia는 2027년 1만대 초과, 2030년 3.8만대 수준을, Bank of America는 연간 판매/보급 장기 시나리오에서 2030-2035년 연간 출하 100만대 레벨 같은 공격적 보급 시나리오를 제시하고 있으며, Morgan Stanley는 시장 매출 대신 노동/임금에 대한 경제적 임팩트로 접근해, 2040년 미국 내 800만 대 working humanoids 같은 그림과 임금 3570억 달러 영향을 제시하고 있습니다.
마지막으로 로봇의 적용에서 빼 놓을 수 없는 부분이 운용시간을 제한하는 배터리 부분입니다. 현재로는 대략 2-4시간이라고 하지만, load나 운용조건에 따라서 시간이 훨씬 단축되어 로봇 활용에 제약이 발생하고 있습니다.
휴머노이드 배터리는 EV와 달리 고출력(순간 피크) + 잦은 충방전 + 경량/소형 + 사람과 근접한 안전을 동시에 만족해야 합니다. 그래서 글로벌 배터리 업체들도 로봇을 신규 수요처로 보고 고방전 성능, 안전 설계, 교체형/모듈형 패키징, BMS 알고리즘을 강화하는 방향으로 움직입니다.
LG에너지솔루션과 삼성SDI는 UAM/드론과 더불어 로봇용 고출력·고신뢰 셀/모듈, 안전 평가 노하우, BMS 기술을 확장하는 흐름으로 볼 수 있으며, 중국 대형 업체들(CATL, EVE 등)도 로봇/드론용 고출력 라인업, 반고체·전고체 로드맵을 통해 에너지밀도와 안전성을 동시에 끌어올리려는 방향성이 뚜렷합니다. 로봇 전용 관점에서는 Grepow처럼 드론/로봇 고방전 팩에 강한 업체들이 팩 설계·방열·커넥터·보호회로까지 포함한 솔루션 형태로 시장을 넓히고 있습니다.
한편 배터리 폼팩터 측면에서 현실적인 선택지는 (1)원통형(2170/4680 등)기반 모듈, (2)파우치 기반 맞춤형 팩, (3)교체형 카트리지(hot swap)팩으로 정리됩니다. 원통형은 공급망이 크고 단가/성숙도가 좋아 양산형에 유리하고, 파우치는 공간 활용(로봇 몸통·등·골반 등 비정형 공간)이 좋아 설계 자유도가 큽니다. Hot swap은 24시간 운영(공장/물류)에서 다운타임을 줄이지만, 커넥터 내구·서지 차단·이중전원 설계 등 시스템 복잡도가 올라갑니다.
적용 시나리오는 산업 현장에서는 hot swap + fleet관제(교체 스테이션)가 강하고, 서비스/리테일은 도킹 충전(반자율-자율)이 현실적이며, 가정용은 사용성 때문에 자율 도킹 + 빠른 보충충전이 중요해집니다. 결론적으로 휴머노이드 배터리 경쟁력은 셀 화학계만이 아니라 팩 구조/열관리/충전·교체 UX/BMS S/W까지 묶인 시스템 경쟁으로 굳어질 가능성이 큽니다.
본 리포트는 지금까지 휴머노이드 로봇에 대한 시장이나 적용 시나리오 등 단발성의 일부 주제에 관한 보고서가 아닌, 로봇자체와 운영 S/W, 액추에이터 등 핵심 부품, 배터리 및 시장에 이르기까지 휴머노이드 로봇에 관한 전반적인 핵심기술, 핵심부품 및 시장전망을 총망라하여 수록하여 기술부터 시장까지 한번에 파악이 가능하도록 구성하였습니다.
따라서 본 리포트의 강점은 다음과 같습니다.
① 본 리포트에서는 핵심 기술 및 핵심 부품을 deep dive로 분석하여 휴머노이드 로봇에 관한 기술적 issue와 향후 개발전망을 통찰할 수 있도록 구성하였습니다.
② 지금까지는 단순했던 글로벌 휴머노이드 로봇 제조업체의 개발역사와 현황 및 정보를 좀 더 상세하게 기술하여 현재의 상황을 파악하는데 크게 도움을 줄 것입니다.
③ 시장전망을 산업/물류산업, 서비스/리테일산업, 가정용 3개 영역으로 나누어 전망하였고, UNIDO, ILO 등 UN기구 및 주요 공개자료를 참고하여 신뢰도 높은 data를 활용함으로써, 실제 로 현장에 가깝도록 예측하여 data의 신뢰성을 한 층 높였습니다.
④ 배터리의 경우, LFP, NCM, 반고체, 전고체 등 화학계로 나누어 전망하였고, 원통형, 파우치형, 각형, 구조전지/custom 팩 등 폼 팩터도 실제로 사용이 가능한 형태로 구분하여 전망함으로써 보다 실제에 가깝게 예측이 가능하도록 구성하였습니다.
목차
1. 휴머노이드 로봇 산업 개요 및 시장·상용화 전망
1-1. 휴머노이드 로봇
1-1-1. 형태학적 분류
1-2. 주요 업체별 모델 상세 제원
1-2. 휴머노이드 로봇 산업 개요
1-2-1. 폭발적 성장과 상용화 전환점
1-2-2. 발전 단계 : 레벨 3(조건부 자율성) → 레벨 4(고수준 자율성)로 전환 중
1-3. 휴머노이드 로봇 시장 전망
1-3-1. 글로벌 시장 전망
1-3-2. 미국 시장 전망
1-3-3. 중국 시장 전망
1-3-4. 미국 vs 중국
1-3-5. 휴머노이드 로봇 제조 원가
1-3-6. 휴머노이드 비용 및 투자 회수 기간 분석
1-3-7. 리서치사별 전망 비교
1-3-8. 휴머노이드 로봇 핵심 부품 시장 규모
1-3-9. 로봇 전체 시장 : 2030년까지 80억 위안(11.2억 달러)을 넘어설 것으로 전망
1-3-10. CES 2026
1-4. 글로벌 휴머노이드 로봇 제조업체 현황
1-4-1. 미국기업, 중국기업
1-4-2. 해외기업 상세 현황
1-4-3. 중국기업 상세 현황
1-4-4. 중국기업들의 기업유형 및 역량
1-4-5. 글로벌 빅 테크들의 현황
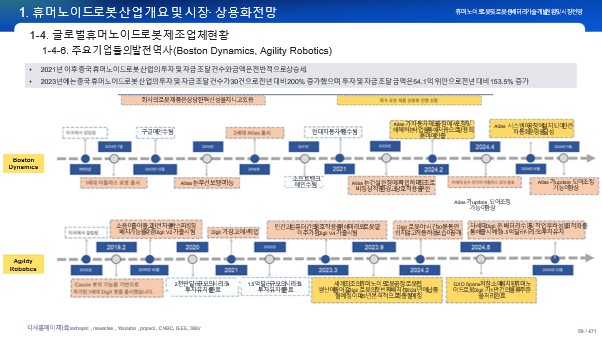
1-4-6. 주요 기업들의 발전 역사
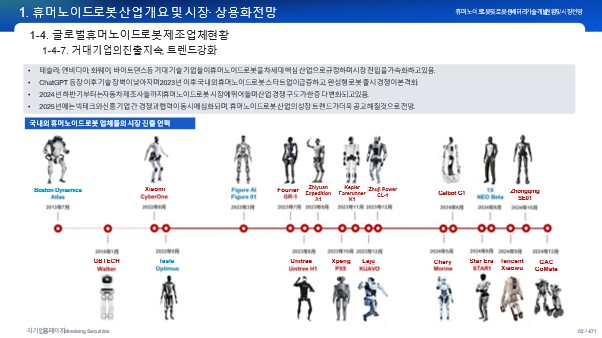
1-4-7. 거대 기업의 진출 지속, 트렌드 강화
1-4-8. 다양한 글로벌 기업들의 참여 활발
2. 휴머노이드 로봇 국가별 정책·산업화 전략과 상용화
2-1. 글로벌 휴머노이드 로봇 산업 동향
2-1-1. 국가별 개발 전략 및 특징
2-1-2. 미국, 유럽, 일본
2-1-3. 일본
2-1-4. 중국
2-2. 개발 전략과 상용화 로드맵
2-2-1. 가속화 되는 발전
2-2-2. (H/W + S/W를 모두 자체 개발 모델) vs. (로봇은 자체 개발 + S/W 대형 모델 제조 협업)
2-2-3. 휴머노이드 로봇 상용화 로드맵
2-2-4. 각국 주요 기업 생산 계획
2-2-5. Application 시나리오
2-2-6. 단기적 적용
2-2-7. 장기적 적용
2-2-8. 특수 용도 → 범용 용도로
2-2-9. 상용화
3. 휴머노이드 로봇에서 사용되는 핵심 지능 기술
3-1. 휴머노이드 로봇 지능 기술/용어
3-2. Embodied AI/LLM · VLA 기술
3-2-1. Embodied AI기술은 휴머노이드 로봇의 자율작동 능력을 향상 시킴
3-2-2. 다중 모드 대규모 모델(LLM)
3-2-3. 다중 모드 대규모 모델(LLM) 개발
3-2-4. Figure 03 범용 비전-언어-행동(VLA) 모델
3-3. 학습 인프라(데이터·훈련·모션캡처)
3-3-1. 훈련
3-3-2. 데이터
3-3-3. 인터넷(Video) 데이터
3-3-4. 시뮬레이션 데이터
3-3-5. 실제 데이터
3-3-6. 고정밀 모션 캡처 시스템
3-3-7. 관성 모션 캡처
4. NVIDIA 중심 로봇 SW/플랫폼
4-1. 휴머노이드 로봇용 S/W
4-1-1. S/W : 지능형 data의 부족이 산업 발전을 저해
4-1-2. S/W : 고품질 data 확보 특수 응용 시나리오의 부족
4-1-3. S/W : Physical AI 및 ACP, MCP 개념
4-1-4. S/W : Physical AI 및 ACP, MCP 비교 및 분리 구조의 중요성
4-1-5. S/W : Physical AI 및 ACP, MCP : Tesla / Boston Dynamics / Figure 전략 비교
4-2. NVIDIA Physical AI 플랫폼 전략과 파트너 생태계
4-2-1. Physical AI 핵심은 인지 · 이해 · 상호작용
4-2-2. Omniverse 기반 Physical AI 생태계 구축
4-2-3. Omniverse 기반 개발 생태계 구축
4-2-4. 개발 플랫폼/툴 – 상황식 통합
4-2-5. 로봇 물리 엔진 Newton 개발
4-2-6. NVIDIA AI + 로봇 엔지니어링 파트너
4-2-7. NVIDIA 휴머노이드 로봇 파트너
4-2-8. 3가지 컴퓨팅 플랫폼 솔루션 프레임워크
4-2-9. DGX 플랫폼 : 인프라 및 전문성의 최적 조합
4-2-10. AGX 플랫폼 : 엣지디바 AI 제품 개발의 혁명
4-2-11. Omniverse 개발 플랫폼- AI기반 tool 생태계
4-2-12. Cosmos 플랫폼- World Foundation Model
4-2-13. 대규모 open source data set + GROOT N1 범용 휴머노이드 로봇 모델 공개
5. Tesla Optimus Deep Dive
5-1. TESLA 기술 진화 · 양산 전략 · 시장성
5-1-1. TESLA AI Day Timeline
5-1-2. Tesla 휴머노이드 로봇의 성능 향상
5-1-3. Tesla AI Day 2022
5-1-4. Tesla Optimus 기술의 발전
5-1-5. Tesla Optimus의 빠른 기능 개선
5-1-6. Tesla Optimus H/W 솔루션 핵심 구성
5-1-7. Tesla Optimus 시장 규모
5-1-8. Tesla 휴머노이드 로봇(Optimus) 시장 전망 및 생산 전략
5-2. Tesla 특허 분석(PCT/US2023/033983)
5-2-1. 로봇의 동력 역할을 수행하는 테슬라의 수직형 에너지 저장 인클로저 기술
5-2-2. 다각도 부착 지점을 통한 로봇 사지와의 견고한 물리적 결합 구현
5-2-3. 덕트(Duct)를 통한 배터리와 컴퓨터의 효율적인 동시 냉각 메커니즘
6. Boston Dynamics ATLAS Deep Dive
6-1. ATLAS 기술 비교 : 세대 진화 · 배터리 전략
6-1-1. ATLAS 2026 version 개요
6-1-2. ATLAS 2026 주요 제원
6-1-3. ATLAS 2026 주요 기능
6-1-4. 1세대 Griper(GR1) vs. 2세대 Griper(GR2) 비교
6-1-5. 2세대 Griper- 대립 엄지(opposable thumb)
6-1-6. 3 손가락 충분/좌우 손 구분
6-1-7. 인간을 넘어서는 가동 범위 : 양손 · 촉각
6-1-8. ATLAS 2024 vs 2026 변화 포인트
6-1-9. ATLAS 2024 vs Optimus vs Figure 03 기술 비교
6-1-10. 배터리 전략
7. 휴머노이드 로봇의 산업 적용
7-1. 적용 확산(제조·물류)과 노동 공급·수요 불균형 해소
7-1-1. Amazon : 물류 로봇 도입 가속화
7-1-2. 자동차 회사 : 지능형 공장에 적용 확산
7-1-3. 제조업체 : 노동 공급과 수요 균형을 완화하는 핵심 요소
7-1-4. 산업 전반 : 노동력 부족 현상을 완화 예정
7-1-5. 항공 우주 분야
7-1-6. CATL
7-1-7. BMW
7-1-8. Figure AI
7-1-9. 중국 미디어그룹
7-1-10. Dongfeng Liuzhou Motors
8. 휴머노이드 로봇 핵심 부품 및 구성 요소
8-1. 핵심 구성요소와 기술 과제
8-1-1. 핵심 부품
8-1-2. 핵심 부품 구성 비교
8-1-3. AI는 기계의 심장
8-2. 액추에이터/모터/감속기/스크류
8-2-1. 액추에이터 구성
8-2-2. 휴머노이드 로봇 핵심 부품 정의·기능
8-2-3. 핵심 부품 각 사별 전략 비교 및 코스트/신뢰성/양산성 비교
8-2-4. 핵심 부품 Cost 전망
8-2-5. 유성 롤러 스크루
8-2-6. Frameless 토크 모터
8-2-7. 감속기
8-2-8. 스크류
8-3. Dexterous Hand(정교한 손)
8-3-1. Dextrous hand 개요
8-3-2. Dextrous hand 구조 종류 및 비교
8-3-3. Hollow Cup 모터/Coreless 모터 /Brushless Cogging 모터 비교
8-3-4. Coreless 모터 시장 규모
8-3-5. 다양한 동력 전달 방식
8-3-6. Coreless (DC) motor 시장 전망
8-3-7. Atlas GR2 vs 인간 vs Tesla Optimus 손 비교
8-3-8. 차세대 Dexterous hands 최적 DoF 시나리오
8-4. 센서(힘/토크/엔코더/시각/촉각)
8-4-1. 센서(내부/외부) 개요
8-4-2. 토크 센서(6차원 센서)
8-4-3. Force sensor(힘 센서 : 6차원)
8-4-4. 힘/토크 센서
8-4-5. 엔코더
8-4-6. 시각 센서
8-4-7. 촉각 센서
8-4-8. 제어 시스템
8-5. 4족 보행 로봇
8-5-1. 저비용·고성능 사족 보행 구동기 및 기계 구조 설계
8-5-2. 보행 능력 향상을 위한 다리 설계
8-5-3. 시스템 신뢰성 및 안전성 장치
9. 휴머노이드 로봇용 배터리
9-1. 개발 현황·시장·기업 구도·EV 대비 비교
9-1-1. 휴머노이드 로봇용 배터리 개요
9-1-2. 휴머노이드 로봇용 배터리 시장
10. 휴머노이드 로봇용 배터리 적용
10-1. 적용 사례
10-1-1. Tesla Optimus
10-1-2. 1X Technologies
10-1-3. UBTECH
10-1-4. 자율주행 로봇용 배터리에 적용
10-1-5. 휴머노이드 로봇 및 4족 보행 로봇에 적용
10-2. 업체 개발 현황
10-2-1. Grepow(CN)
10-2-2. Nandu Power(南都电源) vs Delco (德尔股份)
10-2-3. BTR(贝特瑞) vs Haopeng(豪鹏科技)
10-2-4. EVE Energy(亿纬锂能) vs Lyric Robot(利元亨)
10-2-5. MANST(曼恩斯特) vs Guansheng Tech(冠盛股份)
10-2-6. Gotion High-Tech(国轩高科)
10-2-7. Dataa Robotics (CN)
10-2-8. 아이엘(IL Science, 한국)
11. 휴머노이드 로봇용 배터리 설계/안전/열관리 및 셀/팩 예측
11-1. 배터리 설계/안전/열관리
11-1-1. Figure 03 배터리
11-2. 배터리 셀/팩 예측
11-2-1. 휴머노이드 로봇의 부위별 소비전력 및 필요 에너지 계산
11-2-2. 2170 셀 개수 및 팩 크기 예측 및 장착 가능 여부 예측
11-2-3. 4680 셀 개수 및 팩 크기 예측 및 장착 가능 여부 예측
11-2-4. 주요 휴머노이드 모델의 배터리 팩 설치 용량 예측
11-2-5. 탑승용 vs 신체용 용량 비교/저장성 예측
11-2-6. 2-8시간 운용 런 분석/모델링
11-2-7. 구조전지, 특화배터리 및 Optimus 셀 추정
11-2-8. 로봇 업체별 적용 배터리 spec
12.배터리 팩팩 및 다족 로봇 팩 설계/모델링
12-1. 차세대 구조전지(EFSB)
12-1-1. EFSB 개요
12-1-2. EFSB : 로봇의 힘흡과 다리 역할 수행
12-1-3. EFSB: 전기화학적 성능 및 내구성
12-1-4. EFSB : Soft robot에 적용 - 에너지 저장과 구동 기능 통합
12-1-5. EFSB : 비행 robot에 적용 - 고출력 방전 및 휴대성을 극대화
12-2. 고출력 다족 로봇 배터리팩 설계·모델링
12-2-1. 고출력 다족 로봇용 배터리 팩 설계 및 과도 성능 모델링 : 배경
12-2-2. Molciel 기반 P45B 16S3P 설계
12-2-3. 기계 구조 및 전기 시스템
12-2-4. 배터리 모델링 및 EIS 분석
12-2-5. 시뮬레이션 및 최적화 통합
13.휴머노이드 원가 구조와 저가형 BOM/전략
13-1. Cost 분석
13-1-1. Humanoid 로봇, Actuator, Sensor, LiDAR
13-1-2. 컴퓨팅, 배터리, 골격, S/W
13-1-3. 부품별 원가 범위
13-1-4. 휴머노이드 가격 $20K 이하의 조건
13-1-5. 2025–2030 Cost Scenarios
13-1-6. 2030년 BOM (예시): 50개 관절 + 2.0kWh
13-1-7. 원가 절감 전략
13-1-8. Tesla Bot 예상 단가
13-1-9. Tesla 로봇 BOM 전망(중국산 부품 가격 기준)
13-1-10. Humanoid 로봇 구성 요소별 코스트 비율
14.휴머노이드 로봇 관련 이슈 및 기술적 과제
14-1. 휴머노이드 로봇 이슈
14-1-1. 높은 제조 비용
14-1-2. 높은 유지 관리 비용
14-1-3. 다양한 요구사항에 대한 대응이 어려움
14-1-4. 관련 산업안전기준이 아직 확립되지 않음
14-1-5. 윤리적인 문제
14-2. 휴머노이드 로봇 기술적 과제
14-2-1. 연성 gear 피로 파손 → 고장율 증가
14-2-2. Harmonic(고조파)감속기 전달비 제한 → 정확도/응답속도 저하
14-2-3. Frameless torque motor의 온도상승 제어 → 기계 에너지효율 저하
14-2-4. 데이터 수집 방법의 한계 → 학습 및 적용성에 영향을 미침
14-2-5. H/W 및 S/W 한계 → 로봇 적용 능력 성능에 영향
14-2-6. S/W
14-2-7. 아직은 낮은 인공지능 단계
15.휴머노이드 로봇 관련 업체 동향
15-1. 휴머노이드 주요 기업 현황
15-2. Tesla (US) : 휴머노이드 로봇 제조
15-3. Boston Dynamics (US) : 휴머노이드 로봇 제조
15-4. Agility Robotics (US) : 휴머노이드 로봇 제조
15-5. 1X Technologies (SWE) : 휴머노이드 로봇 제조
15-6. UBTECH Robotics (CN) : 휴머노이드 로봇 제조
15-7. Unitree Robotics (CN) : 휴머노이드 로봇 제조
15-8. Rainbow Robotics (KR) : 휴머노이드 로봇 제조
15-9. Honda (JP) : 휴머노이드 로봇 제조
15-10. Tesla (US) : 액추에이터
15-11. 1X Technologies (SWE) : 액추에이터
15-12. UBTECH Robotics (CN) : 액추에이터
15-13. Rollvis (SWE) : 유성 롤러 스크류
15-14. Ewellix (SWE) : 유성 롤러 스크류
15-15. QCMI&T (CN) : 유성 롤러 스크류
15-16. Bosch (DE) : 감지기(센서)
15-17. Honeywell (US) : 감지기(센서)
15-18. Texas Instruments (US) : 감지기(센서)
15-19. Hanwei Electronics (CN) : 감지기(센서)
15-20. Kollmorgen (US) : Frameless torque motor
15-21. Parker (US) : Frameless torque motor
15-22. Aerotech (US) : Frameless torque motor
15-23. Kinco (CN) : Frameless torque motor
15-24. Nabtesco (JP) : 감속기
15-25. Siemens (DE) : 감속기
15-26. Kollmorgen (US) : 감속기
15-27. Harmonic (CN) : 감속기
16. 휴머노이드 로봇 업체·제품 현황
16-1. 한국 : LG전자, Holiday Robotics, ROBROS, AROBOT, ROBOTIS, WI Robotics, Rainbow Robotics, Robotics LAB, NAVER Labs
16-2. 일본 : KAWASAKI, TOYOTA Research Inst. Honda Robotics, HITACHI, KONDO, SoftBank Robotics, SONY, TokyoRobotics
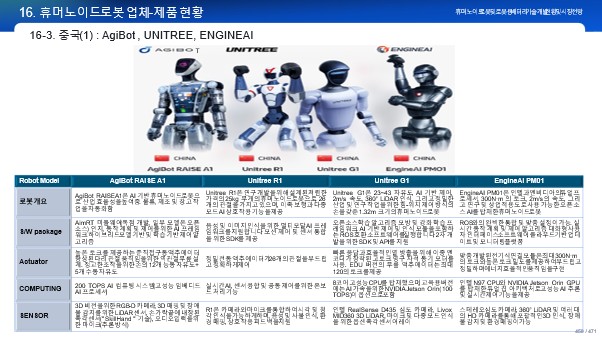
16-3. 중국 : AgiBot, UNITREE, ENGINEAI, AT ROBOTICS, UBTECH, Noetix Robotics, ESTUN, Fourier, Kepler, Leju Robot, Haribot, Fourier, GALBOT, TSROBOT, Beijing Humanoid Robot Innovation Center, CHERY, PUDU, UBTECH, REEMAN, Robot Era, UNI AI, XIAOMI, XPENG
16-4. 미국 : Boston Dynamics, RoboForce, Cartwheel, Diligent Robotics, Figure, Hanson Robotics, Agility Robotics, Apptronik, Westwood Robotics, Beyond Imagination, Borg Robotics, Tesla, Figure
16-5. 독일 : Agile Robotics, German Research Center for Artificial Intelligence (DFKI), German Aerospace Center(DLR), NEURA Robotics
16-6. 영국 : HUMANOID, ENGINEERED ARTS
16-7. 캐나다 : Mirsee Robotics, SANCTUARY AI, Realbotix
16-8. 프랑스 : Enchanted Tools, Wandercraft, InMoov
16-9. 이탈리아 : Istituto Italiano di Tecnologia(IIT), ErgoCub
16-10. 스페인 : PAL Robotics, Keybotic, Macco Robotics
16-11. 노르웨이 : 1X Technologies
16-12. 스위스 : Hexagon Robotics, Duatic AG, Anybotics AG, RIVR